In a study lead by Eisuke Fujinawa at the University of Tokyo, a team of students created a procedure for designing compact VR controllers that feel physically larger. Exploring the concept of ‘haptic shape illusion’, the controllers have data-driven, precise mass properties, aiming to simulate the same feeling in the hand as the larger objects on which they are based.
Simulating the feel of real objects is a fundamental haptics challenge in VR. Today’s general-purpose motion controllers for VR work best when the virtual object is reasonably similar in size and weight; very large or heavy virtual objects immediately seem unrealistic when picked up.
One solution is to use specific controllers for a given application—for instance attaching a tracker to a real baseball bat; in a hands-on with one such solution, Road to VR’s Ben Lang described the significance of gripping a real bat and how that influenced his swing compared to a lightweight controller. But swinging a controller the size and weight of a baseball bat around your living room probably isn’t the best idea.
As shown in the video below, researchers from the University of Tokyo attempted to create much smaller objects that retain the same perceived size. The team designed an automated system which takes the original weight and size of an object and then creates a more compact but similar feeling output through precise mass arrangement.
The paper refers to several ecological psychology studies into how humans perceive the size of an object through touch alone, supporting the idea that perceived length and width is strongly related to the moment of inertia about the hand position.
The team concentrated its efforts on this haptic shape perception, collecting data from participants wielding different sample controllers in VR to determine their perceived sizes, having never seen the controllers in reality. This data allowed the creation of a ‘shape perception model’, which optimises the design of a large object within smaller size constraints, outputting CAD data for fabrication.
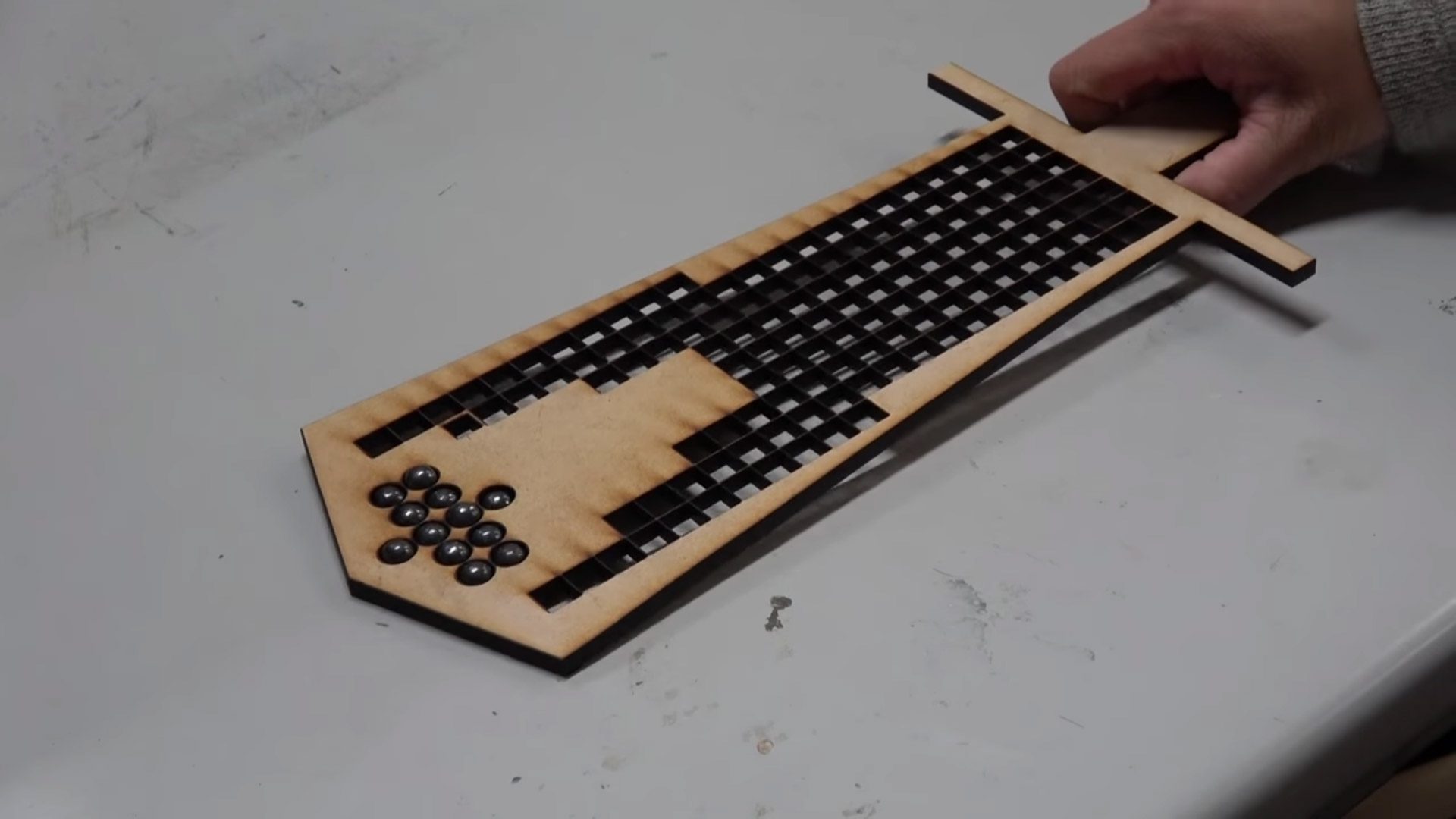
The object is deformed to fit the size constraints, holes are cut out, and weights are placed at specific points to maintain the original moment of inertia.
{kind=link}
The team had VR developers in mind, as this approach could offer a potential benefit in demonstrating a product with a more realistic controller. The CAD data output means that smaller, safer prototype controllers that give the impression of wielding larger objects can be created quickly with a laser cutter or 3D printer.
Further information and the full paper is available on Fujinawa’s website. The research is being presented at this week’s VRST 2017, the 23rd ACM Symposium on Virtual Reality Software and Technology held in Gothenburg, Sweden.