Dexta Robotics, a technology company with presence in the US, China and the UK, has announced the latest iteration of its Dexmo input glove. A new video released demonstrates some of the glove’s capabilities, as a user is shown manipulating blocks in a virtual environment powered by an Oculus Rift headset.
The video, which shows a man moving blocks to spell out ‘Hi!’ and ‘Nĭ hăo,’ claims the gloves offer hand motion tracking and 60fps optical tracking with a latency of less than five milliseconds. The device is shown to offer full finger input, meaning it tracks movements and gestures from all five fingers independently. The 60fps optical tracking is a new and necessary addition to the product, as previous versions were not ‘aware’ of where a user’s hands were in 3D space. Low latency, meanwhile, is particularly important for creating a sense of realism and control with wearable tech, as even minor delays between command input and output make for a less smooth and natural-feeling experience.
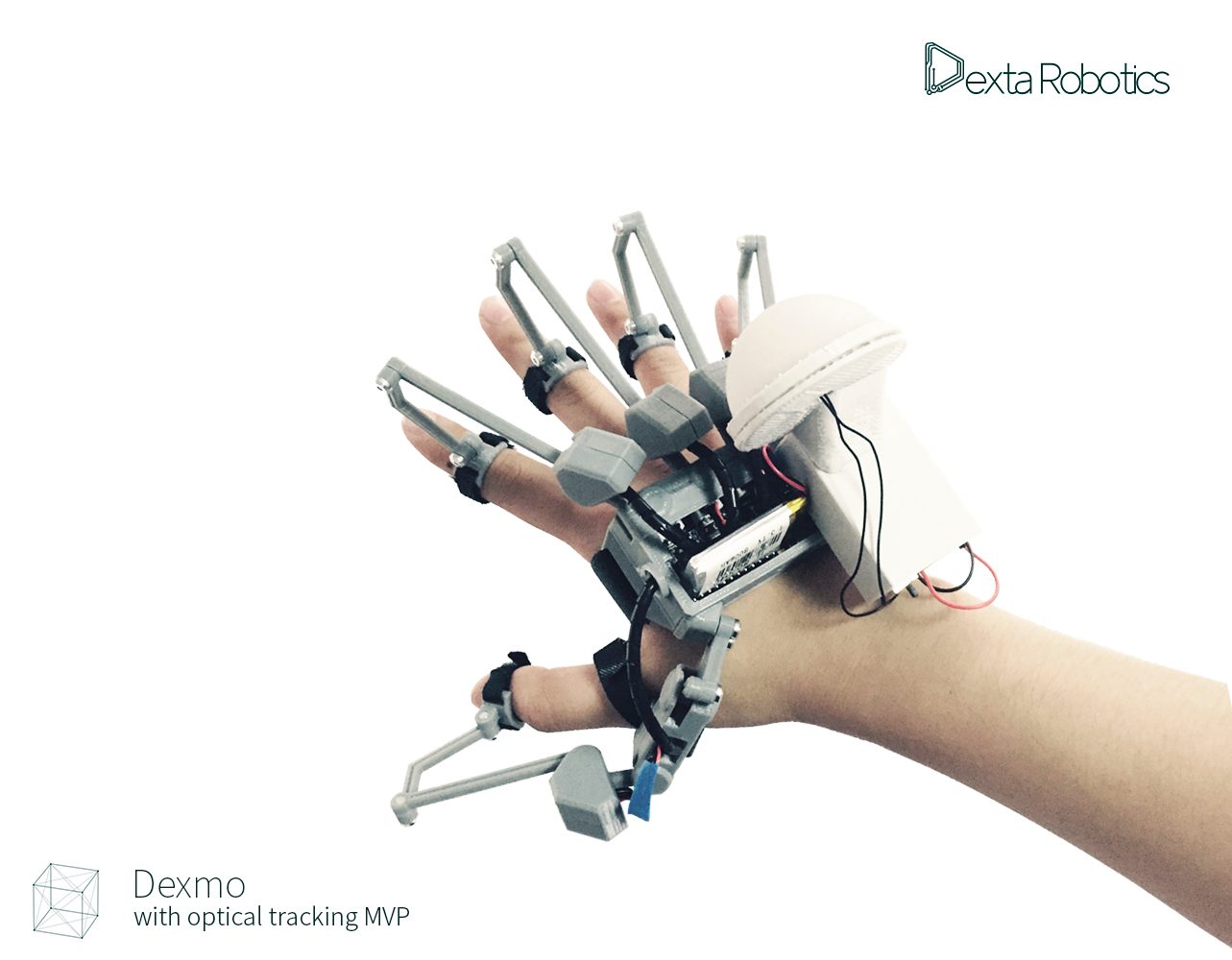
The company has quickly progressed from its earlier F2 prototype, featuring ‘digital force feedback’ on the thumb and index finger – to their current prototype, the F5, featuring full 5 digit force feedback. This allows wearers to feel resistance in those phalanges when they encounter a virtual object, e.g., the blocks in the video demonstration. The result is that users can ‘feel’ virtual objects, at least to the extent that ‘on’ or ‘off’ resistance qualifies as feeling. However, we’re told the company is already working on enhancing the Dexmo’s capabilities with ‘variable stiffness’, able to convey the differences in solidity of a virtual object, say between a balloon and a rock.
For the latest prototype, the company “redesigned the hardware, rewrote the whole communication protocol and optimized both on the hardware and software level,” Aler Gu, CEO of Dexta Robotics, tells Road to VR. Gu credits Depth-VR for providing the optical tracking solution that allows the Dexmo to operate with “5 ms latency for both hands at the same time,” though we’ve yet to see both hands in action. The company promises an updated video will be published demonstrating this at a later date.
Dexta Robotics launched, and subsequently cancelled, a Kickstarter for Dexmo in October and November of 2014. As it happens, Dexta collaborator Depth-VR has a similar start-stop Kickstarter story.

Depth-VR is a Chinese startup that launched a Kickstarter campaign in November 2014 for a “3D head tracking device that brings unprecedented realism to 3D objects on your computer screen.” Despite receiving $56,724 from 139 backers, the Depth-VR team suspended product development in June due to looming financial issues and offered backers full refunds.
Dexmo have confirmed that they will support devices besides the Oculus Rift and that, as an input device builder, their goal is to be as agnostic as possible. Dexta Robotics has not announced a consumer release date for their device, though the company is taking preorders for two different models on its site, so we hope the product will hit the market sooner or later.
Dexta Robotics is not the only company working on making quality haptic gloves a reality: NeuroDigital Technologies’ Gloveone is in development, Virtuix recently worked with Rice University students on a glove prototype, and occasional-Dexta-collaborator Ximmerse is working on its own glove.





