{kind=link}
Palmer Luckey, the creator of the Oculus Rift, has confirmed that Oculus LLC is dropping the Hillcrest tracker that was originally being used as the Oculus Rift headtracker. Now it seems the Rift will use the Adjacent Reality tracker, developed by a former Apple software engineer, which has much enhanced capabilities. Oculus LLC plans to make the Adjacent Reality tracker available to developers separately for those who need a high fidelity wireless tracker for other projects.
An inertial measurement unit (IMU, or colloquially a ‘tracker’) is a small unit which houses a number of sensors which are used to get information about the position of an object in space. Adding a tracker to an HMD allows the position of the user’s head to be tracked. The game being shown on a head mounted display uses this information to determine where the camera position thus allowing the user to look around the virtual world as though they are really inside of it. An HMD is little more than a wearable TV without a way to track the user’s head.
Trackers constantly ping the sensors in the IMU to get information from them. The rate at which this happens is expressed as [samples]Hz (per second). The original Hillcrest tracker gave orientation data at 250Hz which is pretty fast, but Palmer Luckey says that the new tracker is “faster, much faster.”
Oculus Rift Headtracker
Speaking on a thread at the MTBS3D forums, Palmer Luckey confirmed that the Hillcrest tracker had been dropped. Eagle-eyed forum-goer ‘zalo’ spotted that Nirav Patel, who was working on the Adjacent Reality tracker as a separate project, had posted a photo of the Oculus logo with the headline ‘This is why you won’t hear from me for months‘ on his personal blog at the beginning of October.
{kind=link}
Further investigation reveals that he is now employed by Oculus LLC working as a system engineer. Patel, who studied electrical and computer engineering at Carnegie Mellon University, previously worked at Apple as a software development engineer since 2009.
Adjacent Reality as an Open Source Project
Patel was developing the Adjacent Reality tracker with Donnie Cober as an open-source project in which he shared both hardware schematics and open-source firmware (which you can find here, though it is likely outdated relative to what will be released as the Oculus Rift headtracker proper). Prior to starting at Oculus, Patel offered this information about the tracker over at MTBS3D:
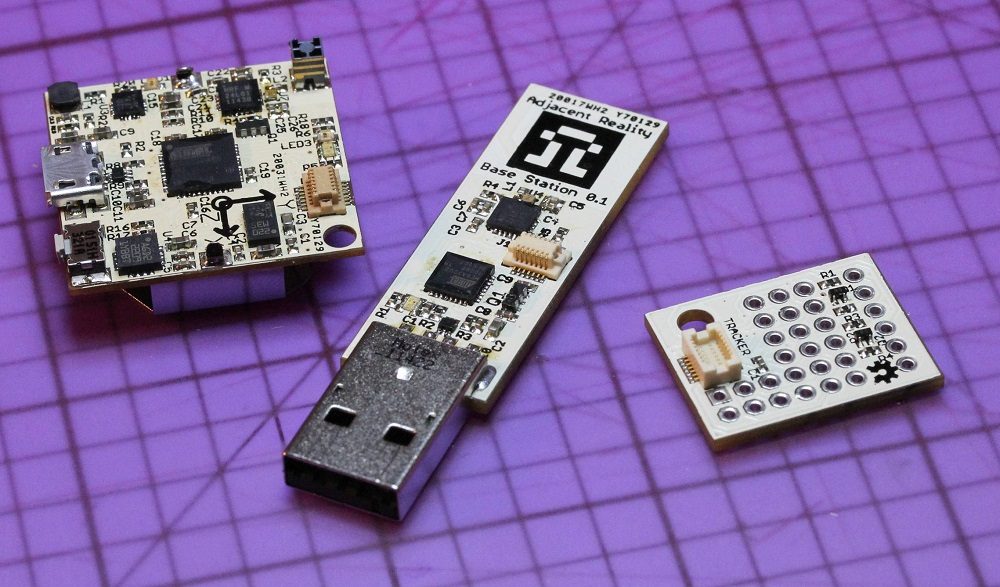
The Adjacent Reality Tracker has 3 axis each of accelerometer, magnetometer, and gyroscope, an RGB LED, an 850nm infrared LED, a lithium ion battery and onboard charger, a USB interfaced microcontroller, and a Nordic radio transceiver. The bare Tracker is around 1.1″x1.1″x0.3″ and weighs 9.2 grams.
The gyro is capable of sampling rates up to 760Hz, and the Nordic link has the throughput to transmit that fully with under 1 ms latency to the Base Station.
He added later that full positional updates (fused information from all the sensors) from the Adjacent Reality IMU are sent at a rate of 500Hz, twice as fast as the original Hillcrest tracker!
At this point we don’t know how the Adjacent Reality tracker may have changed since Patel started working with Oculus. However, Palmer Luckey has said that the plan is to offer the tracker separately for developers who want to use it for other projects. This is great because it will likely already have lots of documentation and support from the Oculus Rift SDK and could be quickly implemented elsewhere. Patel said that the price per unit for a batch of 100 was $42 before starting with Oculus — presumably much larger batches are in order now that it is the Oculus Rift headtracker; prices could come down even below that original $42. Even at that price it would be a great deal for a high quality wireless IMU!
DOF Discrepancy
Palmer Luckey calls the Adjacent Reality IMU a ‘9 DOF’ (9 degrees of freedom) tracker, though he regrets to have to do so because it is a disingenuous description perpetuated by other IMU manufacturers.
‘Degrees of freedom’ describes the possible movements of an object. In reality there are only 6 degrees of freedom total, three of which come from rotation of an object (roll, pitch, yaw) and three which come from the translation of an object (forward/backward, left/right, up/down). All of these degrees of freedom can be quite accurately tracked with an accelerometer, magnetometer, and gyroscope.
Apparently some tracker makers like to add up the axes that these sensors measure (each one measures its particular value across all 3 axes) and thus they device the term ‘9 DOF’. Others seem to claim that their trackers support positional tracking (ie: absolute position in 3D space) and call this 9 DOF as well; in reality they are only using dead-reckoning for absolute positional tracking which isn’t particularly useful due to its potential for errors or what is typically called ‘drift’. Luckey says he’s calling the Oculus Rift headtracker ‘9 DOF’ so that people don’t think it lacks the features of other trackers which also claim, erroneously or not, ‘9 DOF’.
In reality, the Oculus Rift headtracker is 6 DOF because it uses three sensors and can track roll, pitch yaw, as well as inertia when the unit moved forward/back, left/right, and up/down — the same capabilities of other ‘9 DOF’ trackers.